A hybrid EVSA approach in clustered search space with ad-hoc
Por um escritor misterioso
Descrição

A hybrid EVSA approach in clustered search space with ad-hoc partitioning for multi-robot searching

The occupancy grid map model of the real environment after exploration
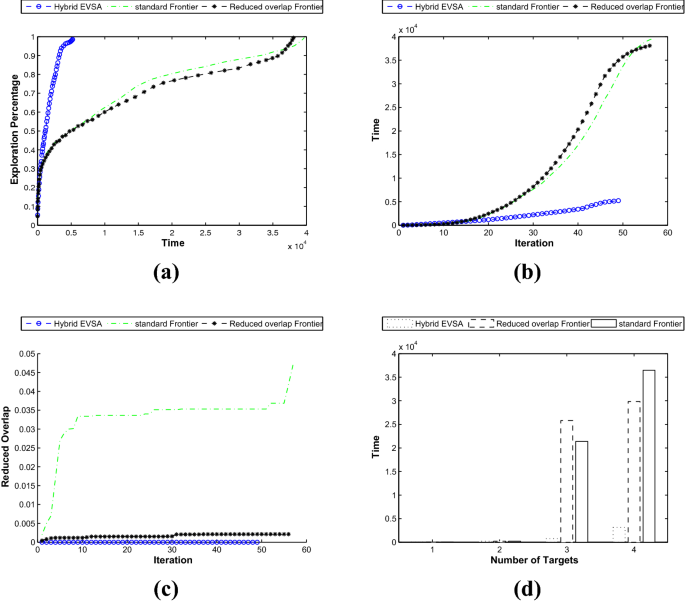
A hybrid EVSA approach in clustered search space with ad-hoc partitioning for multi-robot searching

Flow diagram of the proposed method. Each robot implements all modules.

Hierarchical Clustering - an overview

SiteFerret: Beyond Simple Pocket Identification in Proteins

Comparing the locally and globally coordinated exploration. During

A hybrid EVSA approach in clustered search space with ad-hoc partitioning for multi-robot searching
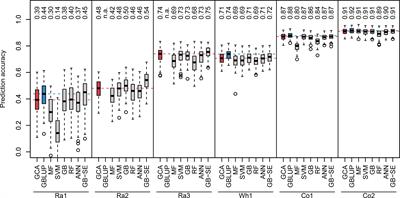
Frontiers Stacked ensembles on basis of parentage information can predict hybrid performance with an accuracy comparable to marker-based GBLUP
Introduction to Evolutionary Data Clustering and Its Applications
NeurIPS 2023 Spotlight Posters

A hybrid EVSA approach in clustered search space with ad-hoc partitioning for multi-robot searching

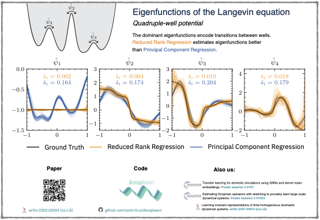
Unsupervised Learning Methods for Molecular Simulation Data
Sensors, Free Full-Text
de
por adulto (o preço varia de acordo com o tamanho do grupo)







