Design and Analysis of a Spherical Joint Mechanism for Robotic Manipulators
Por um escritor misterioso
Descrição
Robotics, Free Full-Text

Control Strategies for Soft Robot Systems - Wang - 2022 - Advanced Intelligent Systems - Wiley Online Library
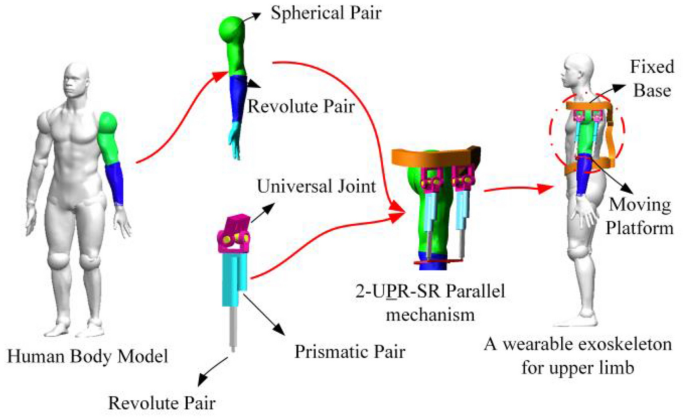
Design and Analysis of a Novel Shoulder Exoskeleton Based on a Parallel Mechanism, Chinese Journal of Mechanical Engineering

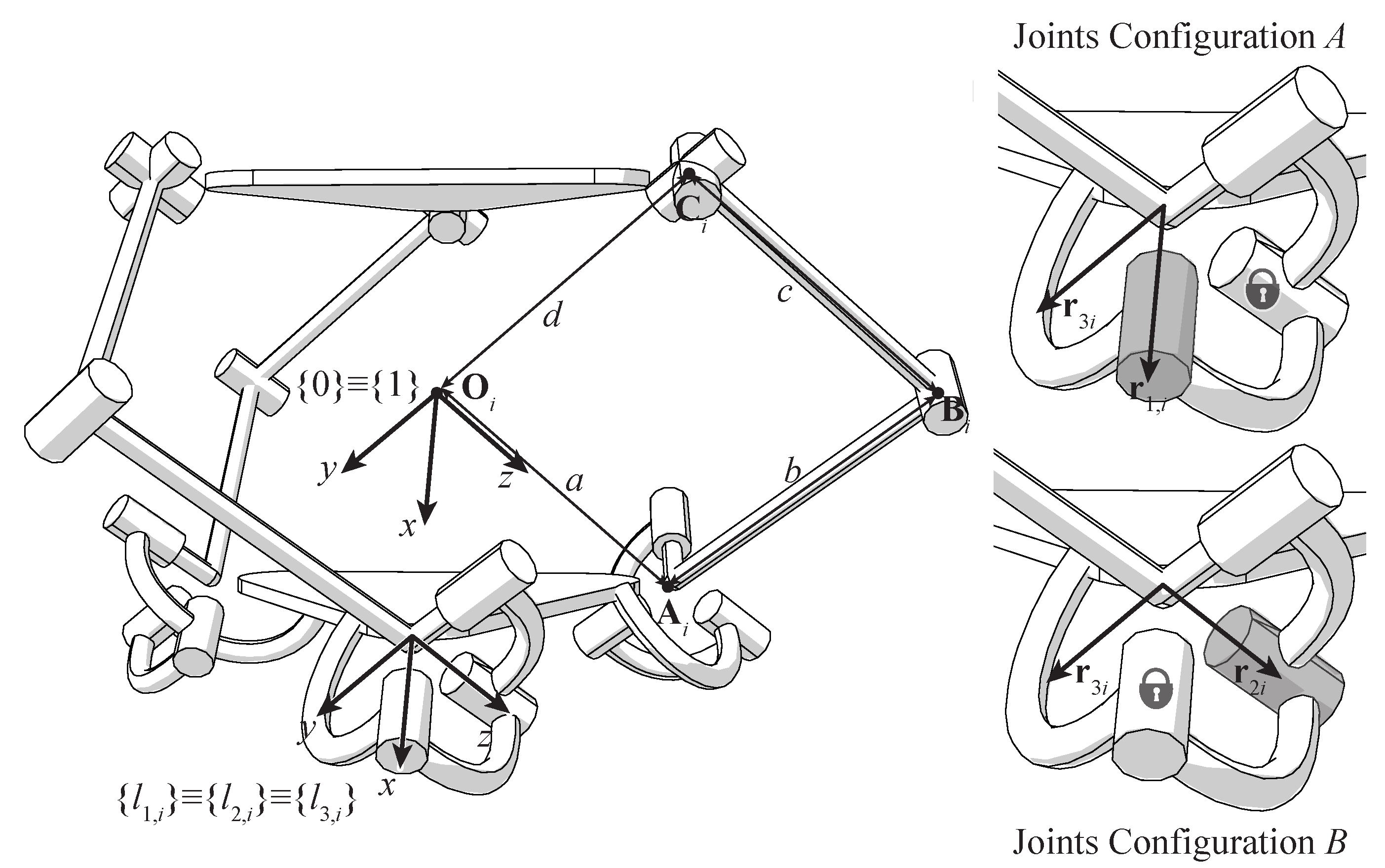
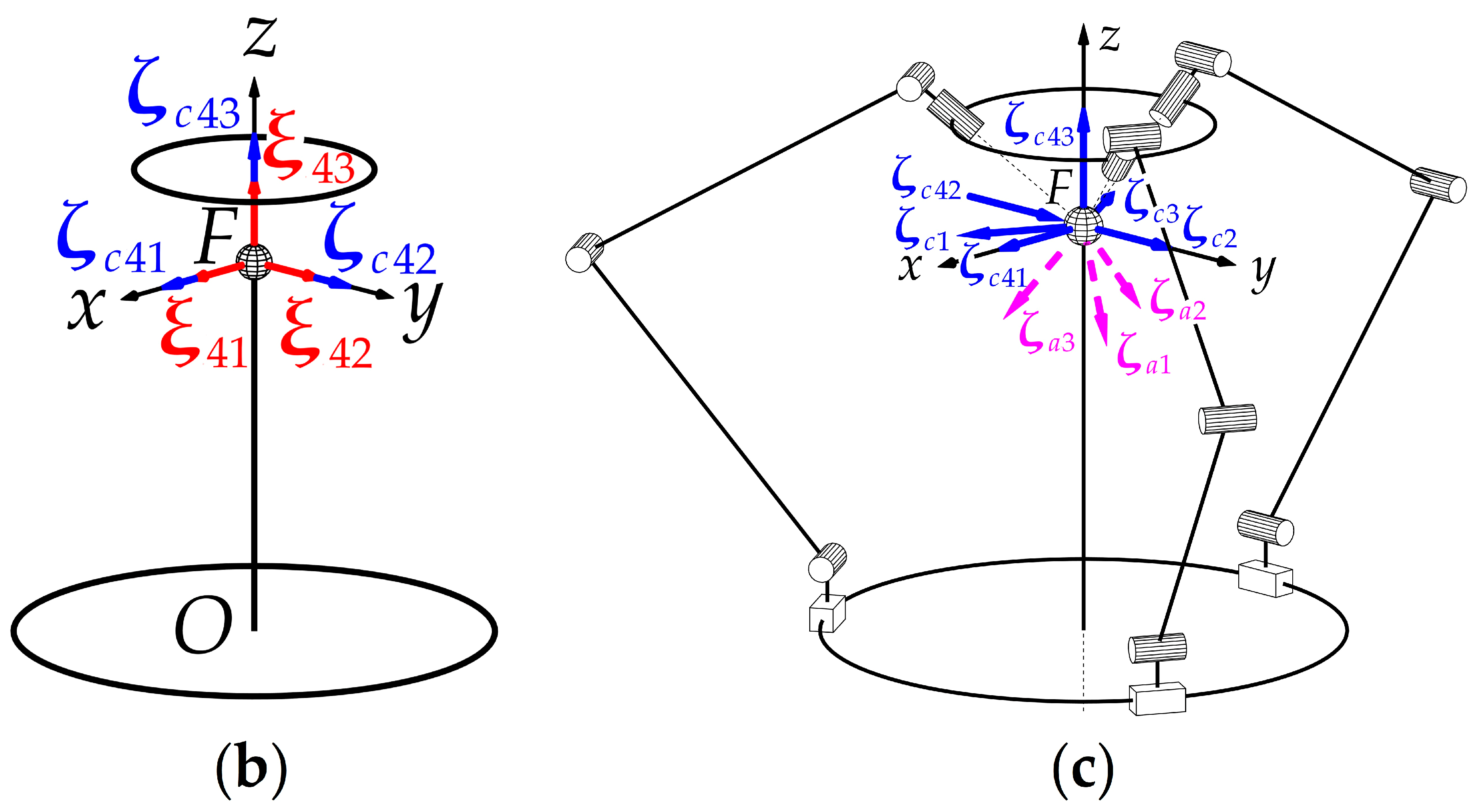
Kinematic model of a spherical parallel manipulator: (a) general model;

Kinematic analysis and optimal design of a novel 3-PRR spherical parallel manipulator - Soheil Zarkandi, 2021
Robotics, Free Full-Text
Revolute Joint: Most Up-to-Date Encyclopedia, News & Reviews
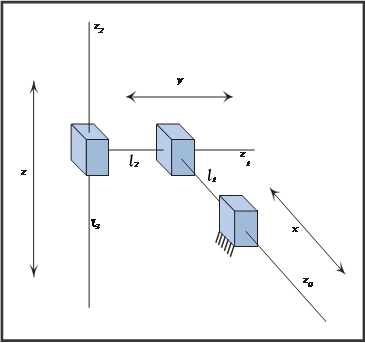
Figure 5. 1 Primitive joint types: (a) a prismatic joint and (b) a revolute joint

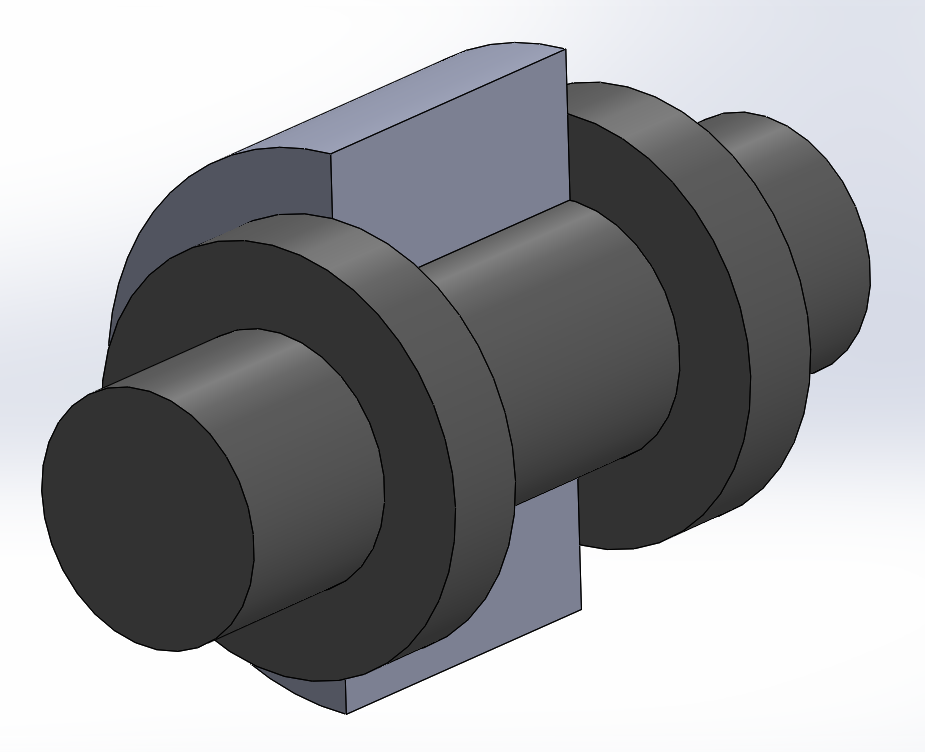
Working principle. (a) Initial assembled position. (b) Lock of ball joint.

A Novel Design of Extended Coaxial Spherical Joint Module for a New Modular Type-Multiple DOFs Robotic Platform
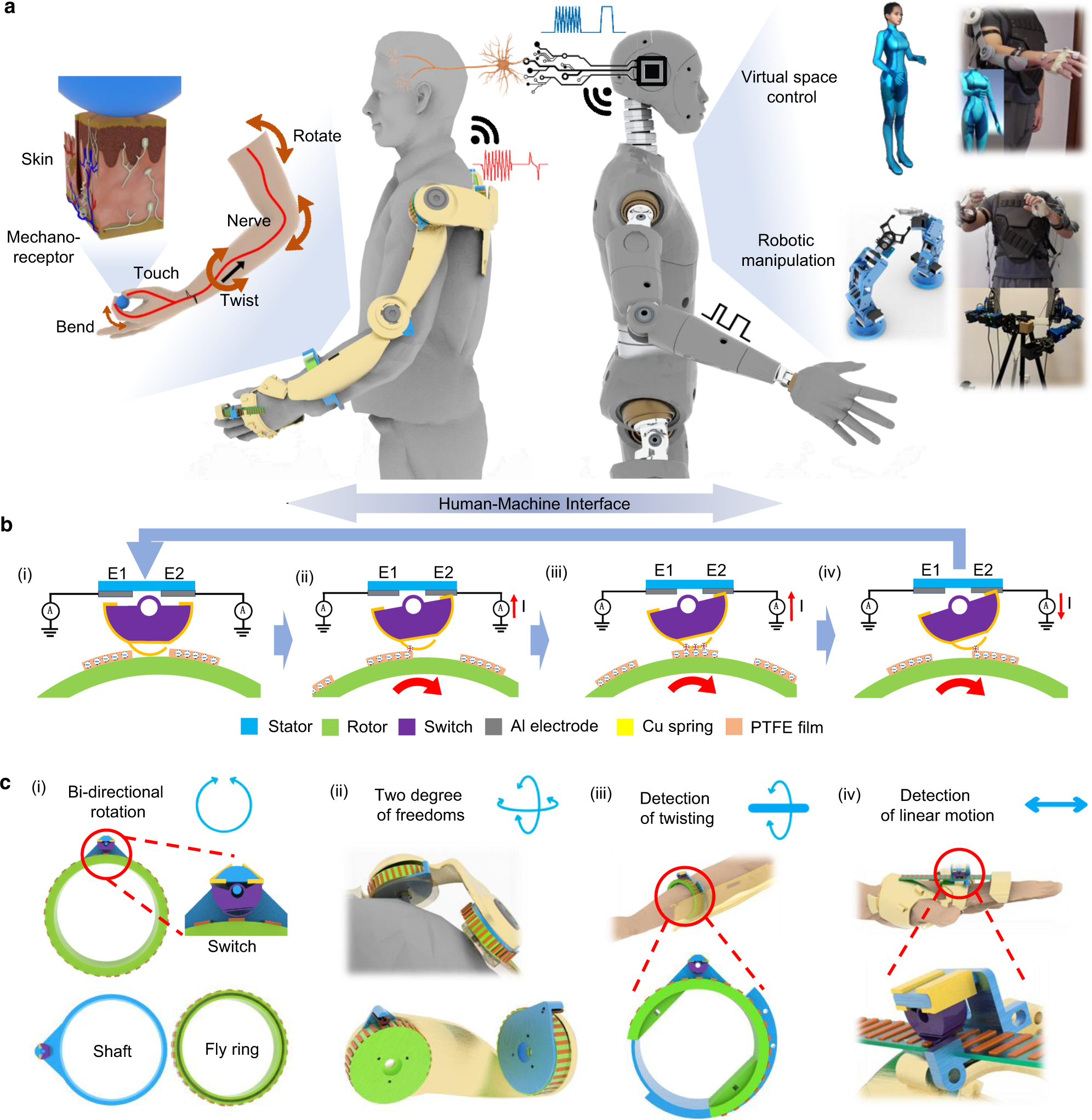
Low cost exoskeleton manipulator using bidirectional triboelectric sensors enhanced multiple degree of freedom sensory system
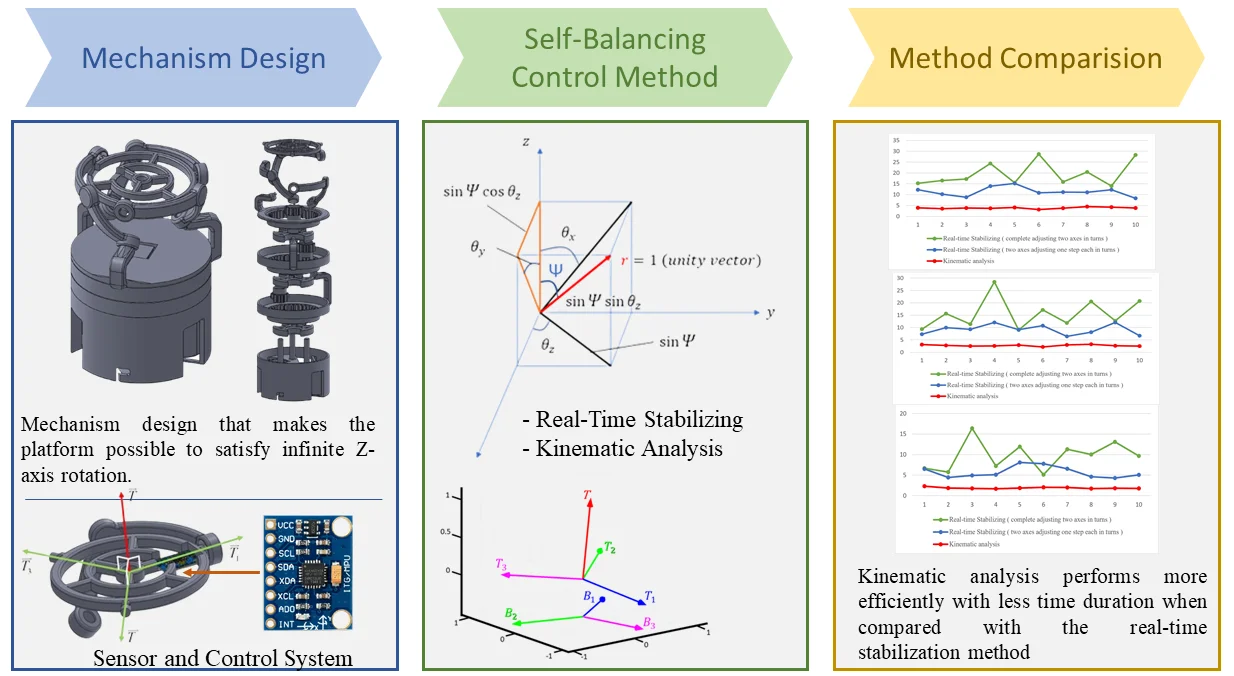
Designing and controlling a self-balancing platform mechanism based on 3-RCC spherical parallel manipulator - Extrica

Kinematics analysis of a novel over-constrained three degree-of-freedom spatial parallel manipulator - ScienceDirect
de
por adulto (o preço varia de acordo com o tamanho do grupo)