Nasr Maswood and Long Pham - ppt download
Por um escritor misterioso
Descrição
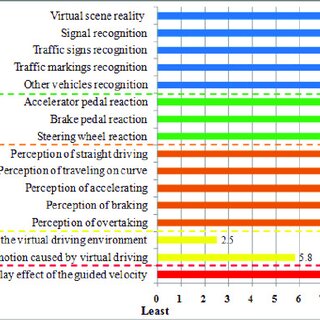
DMV-R. The Nebuchadnezzars. 24in X. 36in. Nasr Maswood and Long Pham. Abstract. Conclusion. Ultimately, we more or less accomplished what we sought out to. We produced a driving simulator that captures many elements of an actual driving test. However, while we accomplished many of our objects there are definitely aspects of our project that could be improved. Unfortunately, lag due to network latency is quite noticeable during play and makes driving difficult at times. Network latency makes avoiding other cars difficult and this can cause players to fail suddenly. Learning to drive is hard. Passing your road test and getting your license is even harder. That’s why more than 4 in 10 people fail their road test. In response to this problem Nebuchadnezzars (Long Pham and Nasr Maswood) have created DMV-R, a virtual reality driving test preparation simulator. The simulation is intended to provide a realistic, helpful experience that will help drivers pass their road test. Objectives. References. The primary objective of DMV-R is to create an immersive driving environment that will familiarize drivers with the road test experience. In order to accomplish this we opted to include the following aspects: Audio instructions that the user is required to follow. If the user does not follow these instructions they will be penalized or they will fail the test. Other vehicles are on the road and the user will have to respond and interact with these cars. If the user hits any of these cars, they will immediately fail the test. Road signs such as stop signs and speed limits are present throughout the course. The driver must respect all these road signs or else they will be penalized by their instructor. After a real road test an instructor generally gives feedback on the applicant’s driving skills and how they can improve if necessary. We wanted to incorporate this into DMV-R. Therefore we have made the game two player. The second player can connect as instructor. The instructor does not have control over the car, but can see everything that happens and give the driver strikes. For this project we relied heavily on the free assets from the Unity asset store. All of the following are from the asset store: The Car model and script used in the simulation. Many environmental set pieces. The models for other cars on the road. The following tutorial was also immensely helpful in creating our AI script for the other cars on the road. The following site provided the stats on driving test failures: Acknowledgements. This project was completed as part of CS 234/334 Mobile Computing (Winter 2017), taught by Prof. Andrew A Chien with TA support by Gushu Li and Ryan Wu. We gratefully acknowledge the generous support of Samsung in providing GearVR equipment.
Business incubation centre

An Updated Definition of Stroke for the 21st Century

De Novo Design of Phototheranostic Sensitizers Based on Structure-Inherent Targeting for Enhanced Cancer Ablation
topicvec/psdvec/competitors/glove/vocab-rcv1.txt at master · askerlee/topicvec · GitHub

3VM11165EE320AA0 Datasheet en, PDF, Automation

De Novo Design of Phototheranostic Sensitizers Based on Structure-Inherent Targeting for Enhanced Cancer Ablation

Biofabrication for neural tissue engineering applications - ScienceDirect

Food waste within food supply chains: quantification and potential for change to 2050

Angiogenic Mechanisms of Human CD34+ Stem Cell Exosomes in the Repair of Ischemic Hindlimb
de
por adulto (o preço varia de acordo com o tamanho do grupo)